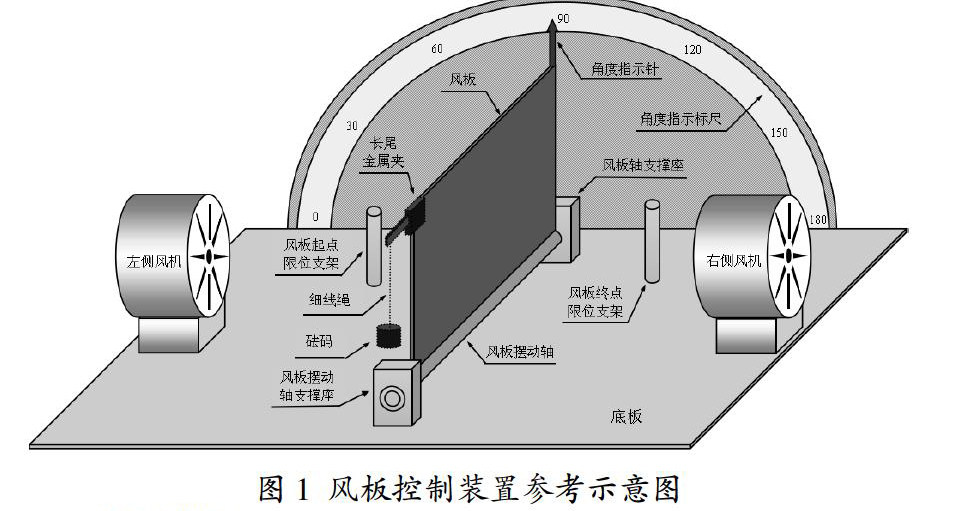
 学生电子设计竞赛高职高专组I题设计任务:设计并制作一个风板控制装置。该装置能通过控制风机的风量来控制风板完成规定动作,风板控制装置参考示意图见图1。因而有了文章的设计。
学生电子设计竞赛高职高专组I题设计任务:设计并制作一个风板控制装置。该装置能通过控制风机的风量来控制风板完成规定动作,风板控制装置参考示意图见图1。因而有了文章的设计。
1 任务分析
根据任务描述,其中的控制的逻辑关系是:控制系统→风机转速→风量→风板转动角度→控制系统。这是一个有反馈的闭环控制,适用经典的PID控制理论进行设计。
逐步分析任务要求,可以发现,首先要选择合适的风机,有足够的风力吹动阻风板;考虑到风属于流体,具有复杂动力性,容易受到干扰,接下来就要设计合适的风道,保证有稳定的风力控制阻风板;阻风板要考虑的问题一是转动灵活,二是风机容易吹动,三是能形成较稳定的风阻,因此阻风板要轻且有一定强度、要灵活支承,要有粗糙表面。
所以本设计用经典PID控制理论设计控制系统,装置结构要选择合适的风机保证足够的风力,设计合适的风道形成稳定的风力,设计制作轻且有一定强度、有灵活支承,有粗糙表面的阻风板。
2 方案设计
根据设计任务要求,本装置拟进行风机控制设计与风板及风道布局设计。
(1)风板及风道布局主要由左右风道、导向装置、风板限位装置、风板、风板转轴及支架以及量角器等组成,初步方案设计如图2所示。风道设计了两种,风道类型I:由梯形锥体聚风槽+圆弧导风板,如图2左边所示;风道类型II,由圆锥体聚风槽+圆型导风管,如图2右边所示。经过反复实验比较,最终选择风道类型I。
(2)本设计选择了风量大、风压小的小型轴流风机。因而风板材质的选择:要求较轻,又具有一定强度,设计中经过试验,选择了较轻ABS树脂材料做风板,并在其表面贴一层薄薄的泡沫层以增加风阻减少扰流。
(3)风机控制系统主要由微控制器及显示模块、角度信息采集模块、风机驱动模块、A/D 采样模块、声光提示、输入以及电源模块等构成,系统框图如图3所示。
其中主要器件的选用如下:
微控制器采用STC12C5A60S2作为主控器,该芯片是一种单时钟、机器周期(IT)单片机,具有高速、低功耗、超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,自带A/D和PWM,运算能力强,软件编程灵活,自由度大。
角度传感器选择了电位器式角度传感器,特点归零方便,线性度高,价格适中,安装方便。
风机驱动调速方式采用单片机内置PWM信号控制PWM调速风机,该方式,电路简单,控制方便。
3 系统设计
根据前面的系统方案设计了各个控制电路。
3.1 主控电路设计
控制电路设计主要包括单片机最小系统、角度信息输入、PWM信号输出、显示电路、蜂鸣报警电路、按键电路、电源电路等,电路图如图4所示。
其中:单片机最小系统由晶振电路、电源组成,晶振22.1184M;
角度传感器输入到单片机A/D输入端1脚;
PWM信号输出来自单片机PWM输出端4、5脚;
键盘、显示等电路接相应的输入输出端口。
3.2 程序设计
整个系统的功能是由硬件电路配合软件来实现的,控制系统的核心是主程序,主程序调用了5个子程序,分别是液晶显示程序、按键处理程序、角度传感器检测、中断控制程序、PWM信号发生。
系统上电后,左右风机按预设风速工作,程序流程图如图5所示。
系统上电后,左右风机按预设风速运行并进行做初始化,接着扫描键盘后判断预设值的设定是否完成,如果没有就继续扫描键盘看是否完成与设置,反之则开始通过扫描键盘判断有没有启动,没有就一直扫描,直到启动后根据角度传感器反馈信号让左右PWM信号按比例输出,对风板稳住进行计时,之后判断计时是否到5s,是的话就停机,否则就扫描键盘看是否停机,没有时程序返回到角度测量并控制左右PWM信号比例再次执行下边的程序,扫描到停止时就停机,程序结束。
4 系统测试
5 结果分析与结论
根据上述测试数据,由此可以得出以下结论:
(1)风板角度能在45°~135°内预设,预设步进值为1°,摆动幅度绝对误差值≤5°,响应时间≤10s,稳定停留时间6s,误差≤1s,风板能平稳停留在终点位置。
(2)风板在45°~135°内预设两值,到达第一个预设角度≤10s,在两个预设角度之间能完成次摆动4次且周期≤5s,幅角≤ 5°,动作完成后风板平稳停留在起点位置。
(3)挂10g砝码,风板能基本完成控制要求。
综上所述,本设计达到设计要求。
参考文献
[1]王静霞.单片机应用技术(C语言版)[M].电子工业出版社,2012.
[2]徐科军.传感器与检测技术[M].电子工业出版社,2008.
[3]张华林,周晓芳.电子设计竞赛实训教程[M].北京航空航天出版社,2007.
[4]孙余凯.电子实用电路集锦[M].电子工业出版社,2008,9.
[5]传爽.单片机原理与应用[M].北京理工大学出版社,2010,12.
[6]李响初.实用电子控制线路200例[M].中国电力出版社,2009,3.
推荐访问: